В регенеративных подогревателях осуществляется подогрев конденсата и питательной воды паром из нерегулируемых отборов турбины. Подогрев осуществляется постепенно за счет распределения отборов пара по давлениям (чем дальше по ходу движения конденсата (питательной воды) расположен подогреватель, тем больше давление поступающего в него пара). Дренаж конденсата греющего пара отводится либо самотеком в подогреватель с меньшим давлением, либо конденсатным насосом, в зависимости от схемы слива дренажей.
Вводная информация по структуре модели
Последствия отклонения уровня в подогревателе:
-
Снижение уровня ведет к проскоку пара, что может спровоцировать кавитацию в насосе;
-
Повышение уровня ведет к заливу теплообменной поверхности и ухудшению теплообмена, а также повышает вероятность заброса воды в турбину.
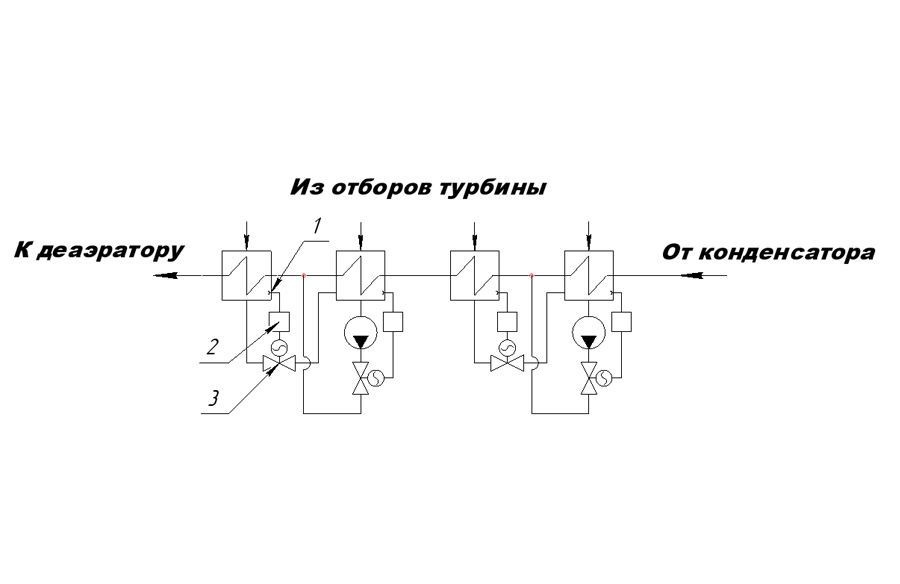
Уровень во всех подогревателях поддерживается за счет регуляторов 1 (Рисунок 1), получающих импульс от уровнемеров 2 и воздействующих на регулирующие клапаны 3.
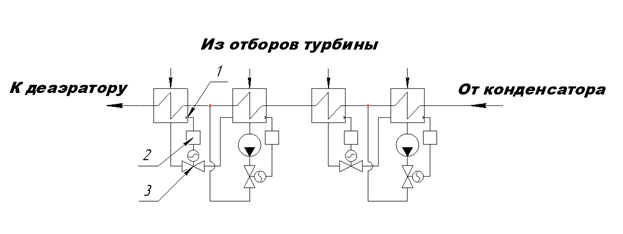
Рисунок 1. – Регулирование уровня в регенеративных подогревателях
Объект регулирования
В качестве объекта регулирования выбран – первый по ходу основного конденсата подогреватель низкого давления (ПНД-1).
Проведение моделирования
Получение кривой разгона
Кривая разгона - процесс изменения во времени выходной переменной, вызванный ступенчатым входным воздействием. Кривая разгона служит для определения динамических свойств объекта.
Модель предварительно выводится на стационарное состояние, затем в качестве возмущающего воздействия моделируется изменение расхода пара c 19,96 кг/с до 20,3 кг/c. Изменение расхода ведет к изменению уровня в подогревателе (см. Рисунок 2).
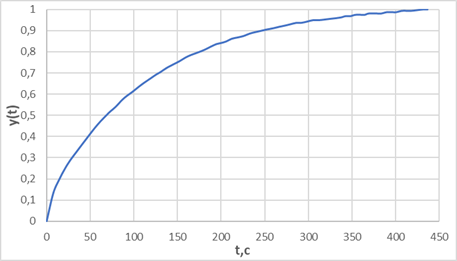
Рисунок 2. – Нормированная кривая разгона (график построен в MS Excel на основе имеющихся данных.)
Таким образом, на основе модели ПНД – 1 получена переходная характеристика (кривая разгона) объекта регулирования. Данная характеристика позволяет получить передаточную функцию объекта для дальнейшего моделирования контура АСР (автоматической системы регулирования) в ПО REPEAT.
Получение передаточной функции
Процесс определения математической модели объекта управления по экспериментальным данным называется идентификацией.
Для более точной идентификации параметров объекта используют метод М.П. Симою, или «метод площадей», который позволяет определить параметры передаточной функции по кривой разгона объекта [1].
В основу метода положено предположение, что исследуемый объект может быть описан безразмерной передаточной функцией с постоянными коэффициентами  представленной в следующем виде [1].
представленной в следующем виде [1].

где:
 оператор Лапласа;
оператор Лапласа;
 нормированная выходная величина;
нормированная выходная величина;
![]() нормированная входная величина;
нормированная входная величина;
 степень полинома знаменателя;
степень полинома знаменателя;
![]() степень полинома числителя.
степень полинома числителя.
При использовании этого метода исходная экспериментальная кривая разгона перестраивается в координатах  , т.е. осуществляется приведение к единице выходной и входной величины в безразмерном виде [1].
, т.е. осуществляется приведение к единице выходной и входной величины в безразмерном виде [1].
где:
 выходная величина;
выходная величина;
 входная величина.
входная величина.
В результате получается исходная характеристика в диапазоне [0,1] (см. Рисунок 2).
Задача идентификации состоит в определении неизвестных коэффициентов передаточной функции  из следующей системы уравнений
из следующей системы уравнений
где:
 коэффициенты уравнения.
коэффициенты уравнения.
Вид искомой передаточной функции
Тогда система уравнений

Коэффициенты  связаны с переходной функцией
связаны с переходной функцией  следующими соотношениями:
следующими соотношениями:
Идентификация объекта завершается проверкой адекватности экспериментальной кривой разгона  и рассчитанной по найденной передаточной функции –
и рассчитанной по найденной передаточной функции –  [1]. Критерий адекватности модели
[1]. Критерий адекватности модели ![]() :
:
где  – время переходного процесса в объекте управления.
– время переходного процесса в объекте управления.
Реализация описанного алгоритма с помощью Python (см. Рисунок 3).
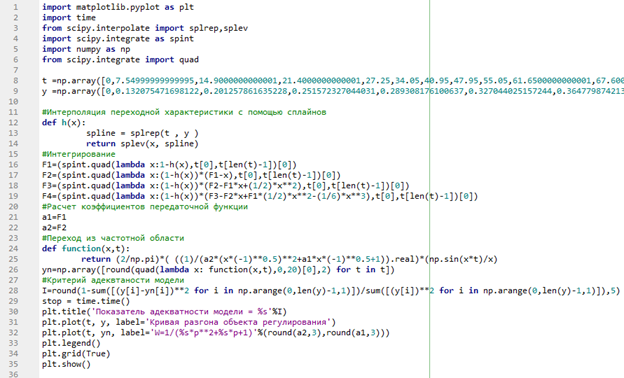
Рисунок 3. – Идентификация кривой разгона методом площадей Симою
Полученный результат представлен ниже (см. Рисунок 4).
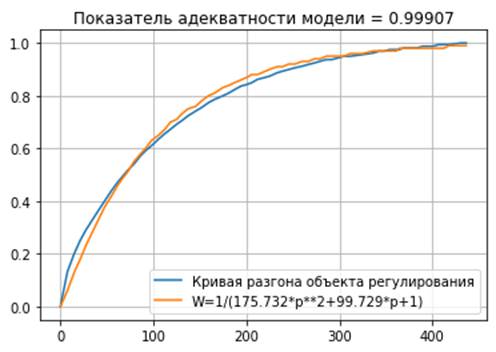
Рисунок 4. – Переходная характеристика полученной передаточной функции в Python IDE
Определение параметров настройки ПИ-регулятора
Настройку регулятора осуществим с использованием библиотек control и scipy в Python. Оптимизацию осуществляем нахождением минимума квадрата отклонения величины от уставки с учетом управляющего воздействия.
Алгоритм расчета с помощью Python приведен ниже (см. Рисунок 5).
Полученные параметры настройки регулятора:


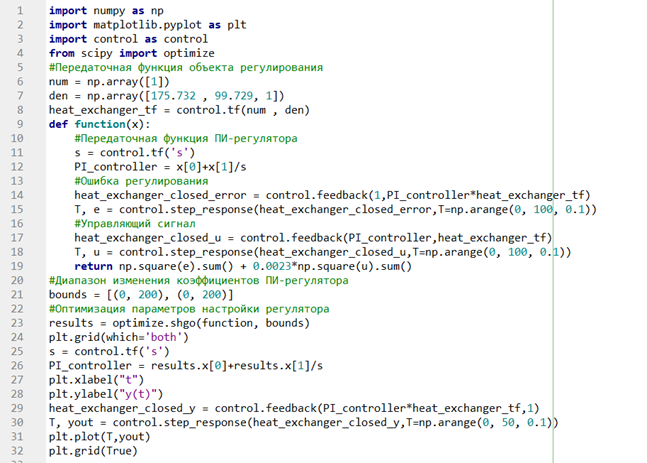
Рисунок 5. – Оптимизация параметров ПИ-регулятора
Переходный процесс
Смоделируем замкнутую АСР с ПИ-регулятором в ПО REPEAT – Рисунок 6.
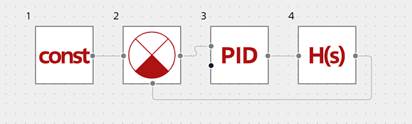
Рисунок 6. – Замкнута АСР уровня в ПНД – 1
Полученный переходный процесс представлен ниже (см. Рисунок 7).
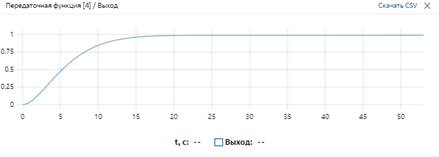
Рисунок 7. – Переходный процесс (визуализация в ПО REPEAT)
Оценка качества переходного процесса
Произведем оценку качества полученного переходного процесса.
1) Динамическая ошибка А1
Согласно полученному графику (рисунок 6) динамическая ошибка отсутствует.

2) Перерегулирование

3) Статическая ошибка

где  – величина сигнала уставки.
– величина сигнала уставки.
4) Степень затухания
Колебания отсутствуют.
5) Время регулирования
Под временем регулирования понимается время  , по истечении которого отклонение регулируемой величины от установившегося значения не будет превышать некоторого заданного значения
, по истечении которого отклонение регулируемой величины от установившегося значения не будет превышать некоторого заданного значения  . Принимается, что
. Принимается, что

Тогда

6) Период колебаний и число колебаний за время регулирования
Колебания отсутствуют.
Результаты моделирования
В данной статье описан процесс получения математической модели подогревателя низкого давления в виде передаточной функции и разработки автоматической системы регулирования поддержания уровня в ПО REPEAT с использованием библиотек Python.
Произведена оценка качества переходного процесса. Переходный процесс является устойчивым и исключает перерегулирование, что снизит колебание уровня воды в подогревателе. Таким образом, основываясь на полученных результатах, можно сделать вывод от достоверности результатов моделирования в ПО REPEAT.
Список использованных источников
- Идентификация и моделирование объектов автоматизации: конспект лекций / А. В. Разживин, А. А. Сердюк. – Краматорск: ДГМА, 2011. – 124с.