Электропривод, как устройство, широко применяется в разных прикладных и научных областях. Чаще всего это электромашиностроение, радиоэлектроника, автомобилестроение, автоматика и вычислительная техника. Для моделирования работы электроприводов при меняются многоконтурные схемы. Оптимальным и эффективным способом является математическое моделирование двухконтурной системы электропривода, и с подобными задачами создания цифровых моделей успешно справляется ПО REPEAT — модельно-ориентированная среда проектирования и математического моделирования. В данной статье описан процесс разработки двухконтурной системы электропривода постоянного тока. По заданным параметрам производится выбор подходящего электродвигателя постоянного тока. С использованием ПО REPEAT создаётся динамическая модель электропривода на основе передаточных характеристик электродвигателя, блока питания (БП), датчиков тока (ДТ) и тахогенератора (ТГ) и проводится синтез регулятора тока и скорости. Модель исследуется с помощью анализа переходных процессов и сравнения с расчетными значениями.
Вводная информация для создания модели
|
Момент инерции нагрузки Jн |
215 кг ∙ м2 |
|
Статический момент сопротивления нагрузки Мн |
145 Н ∙ м |
|
Угловая скорость нагрузки Ωн |
44 град/с |
|
Требуемое угловое ускорение нагрузки εн |
9 град/с2 |
|
Коэффициент передачи блока питания |
24 |
|
Число пульсаций выпрямленного напряжения за период m |
3 |
|
Постоянная времени фильтра |
0,006 c |
|
Входное напряжение суммирующего усилителя контура тока |
8 В |
|
Постоянная времени датчика тока |
0,008 с |
|
Входное напряжение суммирующего усилителя контура скорости |
6 В |
|
Постоянная времени тахогенератора |
0,007 с |
|
Частота питающего напряжение преобразователя |
400 Гц |
|
КПД редуктора |
0,85 |
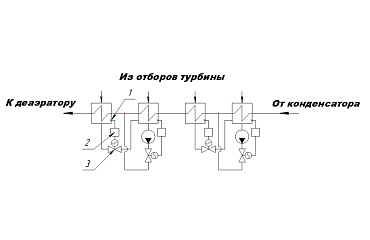
Функциональная схема следящего электропривода
Структурная схема электропривода состоит из потенциометра, усилителя, электродвигателя постоянного тока (ЭД ДПТ), редуктора и тахогенератора (см. Рисунок 1).
Потенциометр является элементом задающего. Управляющие сигналы с выхода потенциометра подаются на вход усилителя, нагрузкой которого является обмотка якоря ЭД постоянного тока с независимым возбуждением.
ЭД через редуктор поворачивают механизм с угловой скоростью, пропорциональной задающему воздействию.
Рисунок 1. Структурная схема следящего электропривода
Тахогенератор образует жесткую обратную отрицательную связь (ООС) по угловой скорости и обеспечивает формирование на входе усилителя сигнала отклонения угловой скорости поворота нагрузки от заданных значений.
В этой статье представлена система замкнутого электропривода (ЭП), построенного по принципу подчиненного регулирования координат на базе REPEAT. Система многоконтурная, она состоит из контура скорости и тока. Каждый контур такой системы настраивается отдельно.
Расчет мощности и выбор электродвигателя постоянного тока
Исходя из требуемых параметров, указанных ниже, проводятся расчеты по выбору ЭД ДПТ и его динамической модели:
- требуемая угловая скорость нагрузки ![]()
- требуемое угловое ускорение нагрузки ![]()
- момент инерции нагрузки ![]()
- статический момент сопротивления нагрузки ![]() ;
;
- КПД редуктора ![]() .
.
1. Для начала необходимо перевести угловую скорость поворота нагрузки из единиц измерений «с» в «рад/с» и угловое ускорение поворота нагрузки из «град/с2» в «рад/с2»:


Рассчитывается требуемая мощность:

2. Выбирается ЭД, номинальная мощность на валу, которого больше требуемой (![]() ˃
˃ ![]() ).
).
Относительно вычисленных параметров выбирается электродвигатель МИ-22Ф. Данный двигатель является реверсивным исполнительным двигателем постоянного тока параллельного возбуждения. Предназначен для работы в схемах автоматического управления. Технические данные приведены в Таблице 1.
Таблица 1. Технические данные ЭД МИ-22Ф
|
Тип двига-теля |
Мощ-ность на валу Рном, кВт |
Частота вращения nном, мин–1 |
Напряже-ние питания Uном, В |
Ток якоря Iя, А |
Сопроти-вление обмотки якоря Rя, Ом |
Момент номинальный Мном, Н ∙ м |
Момент инерции Jдв∙10–4 кг ∙ м2 |
|
МИ-22 |
0,37 |
3000 |
110 |
4,4 |
0,546 |
1,2 |
40,8 |
3. Рассчитывается оптимальное передаточное число редуктора ![]() , согласно формуле:
, согласно формуле:

4. Проверяется выбранный ЭД на соответствие требований по скорости.
Следующей формулой определяется номинальная угловая скорость ![]() :
:
![]()
и приведенная к валу ЭД угловая скорость поворота нагрузки:
![]()
Так как ![]() , то требования по скорости не выполняются.
, то требования по скорости не выполняются.
Рассчитывается новое передаточное число редуктора по формуле:
![]()
5. Рассчитывается значение требуемого вращающего момента ![]() двигателя:
двигателя:

![]()
6. Проверяется выбранный ЭД на соответствие требований по моменту:
![]()
Требования по моменту выполняются.
7. Вычисляются параметры динамической модели ЭД.
7.1. Определяется ![]() коэффициент противо-ЭДС:
коэффициент противо-ЭДС:

7.2. Определяется ![]() коэффициент момента:
коэффициент момента:
![]()
7.3. Определяется ![]() электромеханическая постоянная времени ЭД:
электромеханическая постоянная времени ЭД:

7.4. Для определения ![]() электромагнитной постоянной времени ЭД вычисляется индуктивность якоря:
электромагнитной постоянной времени ЭД вычисляется индуктивность якоря:
![]()
Принимается Lя = 0,0022 Г.
![]()
Вычисляются параметры и коэффициенты электродвигателя:
Электромеханический коэффициент:
![]()
Коэффициент момента двигателя:
![]()
Электромагнитный коэффициент:

С учетом полученных численных значений структурной схемы динамической модели, ССДМ ЭД принимает следующий вид (см. Рисунок 2):
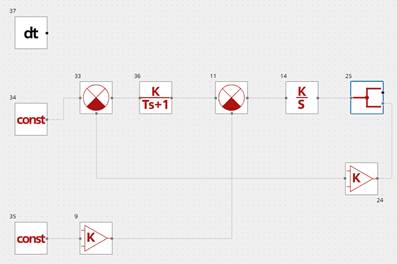
Рисунок 2. Структурная схема динамической модели электродвигателя с числовыми значениями
Переходные характеристики
Ниже представлены результаты моделирования при следующих входных параметрах ЭД серии МИ-22 (см. Рисунок 3 и Рисунок 4).
- напряжение питания Uном = 110 В;
- номинальный момент Mном = 1,2 ![]() ;
;
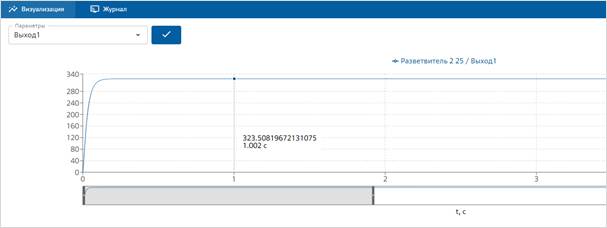
Рисунок 3. Переходная характеристика двигателя ЭД серии МИ-22 по задающему воздействию
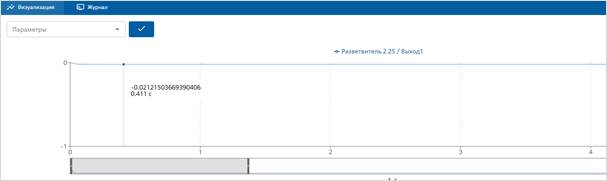
Рисунок 4. Переходная характеристика двигателя ЭД серии МИ-22 по возмущающему воздействию
Анализ переходный характеристик
Определяется относительная погрешность ![]() по формуле:
по формуле:

Паспортное номинальное значение угловой скорости вращения ЭД МИ-22 составляет ![]() и незначительно отличается от результатов моделирования (323.5 рад/с). Это позволяет сделать вывод о правильности проведённых расчётов.
и незначительно отличается от результатов моделирования (323.5 рад/с). Это позволяет сделать вывод о правильности проведённых расчётов.
Настройка контура тока
Динамические свойства БП с большой степенью точности описываются инерционным звеном с передаточной функцией ![]() :
:
![]()
Динамические свойства ДТ также описываются инерционным звеном ![]()
![]()
Теперь можно представить динамическую модель контура тока на базе ПО REPEAT (см. Рисунок 5).
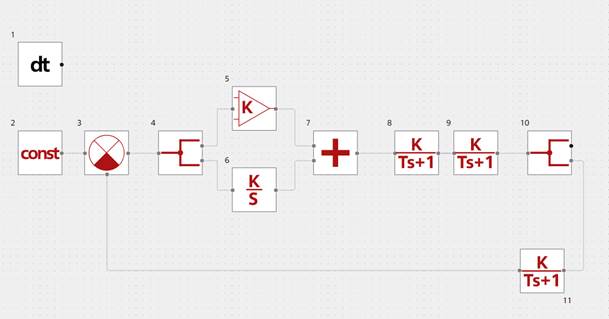
Рисунок 5. Структурная схема динамической модели контура тока
В соответствии со структурной схемой динамической модели контура тока находится ![]() передаточная функция разомкнутого контура тока:
передаточная функция разомкнутого контура тока:

Контур тока (КТ) настроим на оптимум по модулю (ОМ). Передаточная функция КТ, настроенного на ОМ:

где ![]() - суммарная малая постоянная времени КТ. Для ее вычисления определяется постоянная времени БП
- суммарная малая постоянная времени КТ. Для ее вычисления определяется постоянная времени БП ![]() :
:
![]()
Тогда
![]()
Для нахождения передаточной функции регулятора тока (РТ) необходимо приравнять правые части выражений (3.3) и (3.4):

Полученное выражение по своей структуре является передаточной функцией ПИ-регулятора:

Из сравнения двух последних формул, можно получить формулы для расчета коэффициента передачи Kрт и постоянной времени Трт РТ:

![]()
Для вычисления коэффициента передачи датчика тока необходимо применить формулу:

Для построения контура тока в соответствии с (3.6) вычисляется передаточная функция регулятора тока:

Переходная характеристика
Преамбула с указанием (см. Рисунок 6).
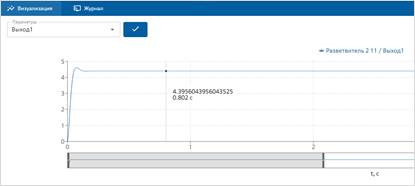
Рисунок 6. Переходная характеристика контура тока по задающему воздействию (значение задающего воздействия на КТ равно 8 В)
Анализ переходной характеристики
Определяется величина перерегулирования σкт и время нарастания ![]() .
.
Перерегулирование рассчитается по формуле:

Ожидаемое значение перерегулирования ![]() при настройке на ОМ
при настройке на ОМ ![]()
По рис. 7 определяется ![]() максимальное отклонение тока якоря:
максимальное отклонение тока якоря:
![]()
и ![]() установившееся значение тока:
установившееся значение тока:
![]()
Определяется перерегулирование:

Значение перерегулирования соответствует правильной настройке.
Время нарастания ![]() определяется в первой точке пересечения графика переходной функции и установившегося значения тока якоря:
определяется в первой точке пересечения графика переходной функции и установившегося значения тока якоря:
![]() .
.
Из графика (рис. 6) находится время нарастания ![]() :
:
![]()
Время нарастания можно рассчитать, и оно должно удовлетворять требованию:
![]() .
.
Отклонение измеренного и рассчитанного значения ![]() :
:
![]()
Отклонение небольшое и допустимое. Можно сделать вывод, что настройка контура тока на оптимум по модулю проведена успешно.
Настройка контура скорости на симметричный оптимум
Контур скорости (КС) состоит из следующих элементов:
- регулятора скорости (РС) F1;
- КТ, настроенного на ОМ;
- электромеханической части двигателя;
- тахогенератора (ТГ).
Перед тем как приступить к построению схемы КС, необходимо представить все элементы контура в виде звеньев.
Динамические свойства ТГ (инерционное звено):
![]()
Настройка контура скорости проводится на симметричный оптимум (СО).
При настройке КС на СО выражение в зоне рабочих частот из-за малости значений постоянных времени Tдт и ![]() передаточная функция контура тока
передаточная функция контура тока ![]() может быть представлено в упрощенном виде:
может быть представлено в упрощенном виде:

Передаточная функция разомкнутого КС ![]() :
:

где ![]() – суммарная малая постоянная времени КС.
– суммарная малая постоянная времени КС. ![]()
Передаточная функция КС ![]() , настроенного на СО, имеет вид:
, настроенного на СО, имеет вид:

Для определения структуры РС необходимо приравнять правые части выражений (4.3) и (4.4):

Введем обозначения для получения формулы ПИ-регулятора:
Коэффициент передачи РС ![]() :
:

Постоянная времени РС:
![]()
Тогда передаточная функция регулятора скорости контура примет вид:

Вычисляется требуемый коэффициент передачи ТГ по формуле:
![]()
Передаточная функция ![]() регулятора скорости по формуле (4.8):
регулятора скорости по формуле (4.8):

Рассчитывается коэффициент передачи редуктора ![]()
![]()
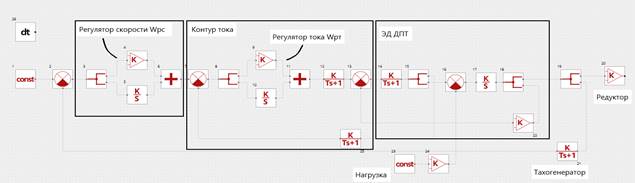
Рисунок 7. Структурная схема динамической модели контура скорости
Переходные характеристики
Построим выходные характеристики и проведем анализ полученных результатов.
1. Построение переходной характеристики КС по задающему воздействию. Значение задающего воздействия на КС ![]() = 6 В.
= 6 В.

Рисунок 8. Переходная характеристика контура скорости по задающему воздействию
2. Построение переходной характеристики КС по возмущающему воздействию (статическому моменту сопротивления нагрузки). Нагрузка Мн = 145 Н ∙ м.
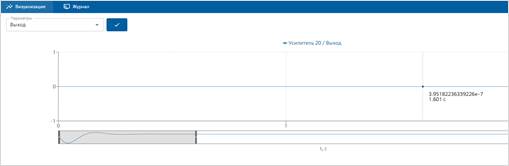
Рисунок 9. Переходная характеристика контура скорости по возмущающему воздействию
Моментная составляющая ошибки ![]() в установившемся режиме сводится к нулю.
в установившемся режиме сводится к нулю.
Анализ переходных характеристик
Максимальное отклонение угловой скорости вращения вала ЭД ![]() и установившееся значение
и установившееся значение ![]()
Ожидаемое значение перерегулирования ![]() при настройке на СО
при настройке на СО ![]()
Перерегулирование σкс:

Отклонение от ожидаемого значения составляет ![]() и принимается допустимым.
и принимается допустимым.
Время нарастания полученной характеристики ![]() :
:
![]()
Расчетное значение ![]() :
:
![]()
Отклонение измеренного и рассчитанного значения ![]() :
:
![]()
Отклонение по ![]() допустимое. Настройка контура скорости на оптимум по модулю проведена успешно.
допустимое. Настройка контура скорости на оптимум по модулю проведена успешно.
Результаты моделирования
В данной статье была разработана динамическая модель следящего электропривода постоянного тока и проведен синтез регулятора тока и скорости (двухконтурной системы) с применением методов стандартных настроек таких как оптимум по модулю и симметричный оптимум. В ходе работы был выбран электродвигатель постоянного тока МИ-22Ф.
Для задачи создания цифровой модели было успешно использовано ПО REPEAT. Результаты моделирования и расчетные значения показали, что контур скорости и тока был настроен верно с допустимыми значениями отклонений.