Организация управления в асинхронных электроприводных системах векторным управлением актуальна в транспортных и подъемных устройствах, а также в приводах подач различных моделей станков.
Это обусловлено тем, что векторное управление с двухконтурными каналами регулирования по скорости и потокосцеплению обеспечивает высокую точность и широкий диапазон регулирования скорости, а также высокие значения моментов.
В этой статье описан опыт моделирования системы подчиненного регулирования асинхронного электропривода на базе ПО REPEAT с использованием серийно выпускаемого электродвигателя МТКН 412-6.
Исходные данные для создания модели
Предполагается, что нагрузку необходимо вращать со следующей скоростью и ускорением:
- угловая скорость нагрузки  ;
;
- угловое ускорение нагрузки ![]() .
.
Привод оснащен редуктором, для начала примем:
- передаточное число ![]() ;
;
- КПД редуктора ![]()
Также предполагается, что двигатель необходим для привода тяжелых грузов:
- статический момент сопротивления нагрузки Мн = 10000 Н ∙ м;
- момент инерции нагрузки ![]()
1. Расчет мощности и выбор асинхронного электродвигателя
Исходя из требуемых параметров, указанных ниже, проводятся расчеты по выбору ЭД ДПТ и его динамической модели.
- требуемая угловая скорость нагрузки ![]()
- требуемое угловое ускорение нагрузки ![]()
- момент инерции нагрузки ![]()
- статический момент сопротивления нагрузки ![]() ;
;
- КПД редуктора ![]() .
.
1) Рабочая угловая скорость вращения нагрузки
![]()
2) Оценим приблизительную мощность асинхронного двигателя по формуле

С учетом требуемой мощности, выберем асинхронный электродвигатель с короткозамкнутым ротором типа МТКН 412-6. Справочные данные приведены в Таблице 1 ниже:
Таблица 1. Технические данные двигателя МТКН 412-6.
|
Мощность Рном, кВт |
Синхронная частота вращения n0, об/мин |
Номинальная нагрузка |
||
|
частота вращения nн, об/мин |
КПД ηн, % |
cosφн |
||
|
30 |
1000 |
945 |
87,5 |
0,85 |
|
Мном, Н·м |
Iпуск, А |
Jдв, кг· |
||
|
303 |
820 |
0,63 |
||
1.1 Расчетные параметры электродвигателя
1. Синхронная угловая частота вращения двигателя
![]()
2. Номинальная частота вращения двигателя
![]()
3. Номинальное скольжение двигателя

4. Номинальный ток статора
![]()
1.2 Проверка на соответствие требований по скорости и моменту
Рассчитывается новое передаточное число редуктора по формуле
![]()
Проверяется выбранный ЭД на соответствие требований по скорости.
Проведем проверку выбранного ЭД на соответствие по скорости
![]()
![]()
Требования по скорости выполняются.
Проверяется выбранный ЭД на соответствие требований по моменту.

Допустимый момент составляет
![]() ,
,
Тогда
![]()
Условие по соответствию момента выполняется.
2. Определение параметров схемы замещения электродвигателя по техническим данным электродвигателя
Справочные данные параметров приведены в Таблице 2 ниже для схемы на Рисунке 1:
Таблица 2. Параметры схемы замещения асинхронного двигателя
|
|
|
|
|
|
|
|
|
|
|
0,219 |
0,169 |
|
0,214 |
0,229 |
|
6,082 |
0,403 |
|
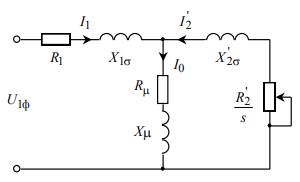
Рисунок 1. Схема замещения асинхронного двигателя
Ток статора двигателя при частичной нагрузке

где ![]() ¾ коэффициент загрузки двигателя, примем
¾ коэффициент загрузки двигателя, примем ![]()
![]() ¾ коэффициент загрузки двигателя, примем
¾ коэффициент загрузки двигателя, примем ![]()
Коэффициент мощности при частичной нагрузке:
![]()
Теперь определим ток холостого хода асинхронного двигателя:
Далее, для определения активного сопротивления обмотки ротора, приведенного к обмотке статора, необходимо определить критическое скольжение, коэффициенты ![]() и
и ![]() (коэффициенты, определяющие конструктивные особенности АД).
(коэффициенты, определяющие конструктивные особенности АД).
Критическое скольжение:

где ![]() – коэффициент, значение которого находится в диапазоне 0,6–2,5, принимаем b =1.
– коэффициент, значение которого находится в диапазоне 0,6–2,5, принимаем b =1.
Коэффициенты:
Активное сопротивление обмотки ротора, приведенное к обмотке статора АД:
Активное сопротивление статорной обмотки:
![]()
Далее определим индуктивные сопротивления. Для начала необходимо определить коэффициент ![]() с помощью которого определяется индуктивное сопротивление КЗ:
с помощью которого определяется индуктивное сопротивление КЗ:
тогда
![]()
Индуктивное сопротивление статорной обмотки:
![]()
Индуктивность обмотки статора, обусловленная потоком рассеяния, в номинальном режиме:
![]()
Рассчитаем индуктивное сопротивление роторной обмотки, приведенное к статорной:
![]()
Обусловленная потоком рассеяния индуктивность обмотки ротора:
Согласно векторной диаграмме ЭДС ветви намагничивания Е1, наведенная потоком воздушного зазора в обмотке статора в номинальном режиме, равна:
![]()
Индуктивное сопротивление контура намагничивания:
![]()
Результирующая индуктивность:
3. Выбор частотного преобразователя
Далее выбирается преобразователь частоты, важного элемента силового канала системы электропривода. Для данной системы выбираем преобразователь частоты Dyna-Hoist V (vector) 55 F 34–A. Справочные данные параметров приведены в Таблице 3 ниже:
Таблица 3. Параметры преобразователя частоты
|
Параметры питающей сети |
Выходной частоты |
Выходной ток |
||
|
|
|
|
|
|
|
380-500 |
50/60 |
0-120 |
150 |
225 |
Условия проверки правильности преобразователя частоты проводятся относительно электромеханической характеристик разомкнутой системы электропривода, с помощью которых определяют максимальный ток статора. Проведем упрощение и примем допустимый ток статора равный:
![]()
Условия проверки правильности выбора преобразователя частоты:
![]()
![]()
![]()
![]()
Требования соблюдаются, преобразователь частоты выбран подходящий.
4. Силовой канал электропривода
Структурная схема силового канала непрерывной линеаризованной системы ПЧ–АД во вращающейся системе координат, ориентированной по результирующему вектору потокосцепления ротора приведена на рисунке 2. Управляющими сигналами на входе преобразователя структурной схемы силового канала являются напряжения постоянного тока. Выходные напряжения преобразователя представляют собой составляющие напряжения статора ![]() и
и ![]() в ортогональной системе координат d, q, ориентированной по результирующему вектору потокосцепления ротора
в ортогональной системе координат d, q, ориентированной по результирующему вектору потокосцепления ротора ![]() .
.
Рисунок 2. Структурная схема силового канала системы ПЧ-АД во вращающейся двухфазной системе координат, ориентированной по результирующему вектору потокосцепления ротора
4.1. Расчет параметров элементов структурной схемы силового канала электропривода
4.1.1 Расчет параметров двигателя
Эквивалентные индуктивности обмоток:
- статора:
![]()
- ротора:
![]()
Коэффициент рассеяния:
Эквивалентное сопротивление:
Электромагнитные постоянные времени:
![]()
Номинальный поток двигателя:
![]()
Значение номинального тока ![]() , А:
, А:
![]()
Значение номинального тока ![]() , А:
, А:
![]()
Максимально допустимое значения тока ![]() , А:
, А:
![]()
4.1.2 Расчет параметров преобразователя
Максимальное значение коэффициента усиления преобразователя:
где ![]() максимальное значение напряжения управления, В. Принимается равным 10 В.
максимальное значение напряжения управления, В. Принимается равным 10 В.
Эквивалентная постоянная времени преобразователя
где ![]() несущеая частота инвертора, Гц. Принимается равным 8 кГц.
несущеая частота инвертора, Гц. Принимается равным 8 кГц.
5. Линеаризованная САУ частотно-регулируемого асинхронного электропривода при векторном регулировании скорости
Структурная схема линеаризованной непрерывной САУ частотно-регулируемого электропривода с векторным управлением приведена на Рисунке 3.
На схеме приняты следующие обозначения:
![]() ,
, ![]() ,
, ![]() передаточные функции регуляторов тока, потокосцепления и скорости;
передаточные функции регуляторов тока, потокосцепления и скорости;
![]() коэффициент обратной связи по току,
коэффициент обратной связи по току, ![]() ;
;
![]() коэффициент обратной связи по потокосцеплению ротора,
коэффициент обратной связи по потокосцеплению ротора, ![]() ;
;
![]() коэффициент обратной связи по скорости,
коэффициент обратной связи по скорости, ![]() ;
;
Малая постоянная времени цепи обратной связи по току
![]()
где ![]() интервал сглаживания результатов измерения тока, в котором
интервал сглаживания результатов измерения тока, в котором ![]() принятое количество периодов частоты квантования в интервале измерения тока.
принятое количество периодов частоты квантования в интервале измерения тока.
Малая постоянная времени цепи обратной связи по потокосцеплению
![]()
где ![]() интервал расчета потокосцепления, в котором
интервал расчета потокосцепления, в котором ![]() принятое количество периодов частоты квантования в интервале расчета потокосцепления.
принятое количество периодов частоты квантования в интервале расчета потокосцепления.
Аналогично рассчитывается малая постоянная времени цепи обратной связи по скорости с ![]() .
.
![]()
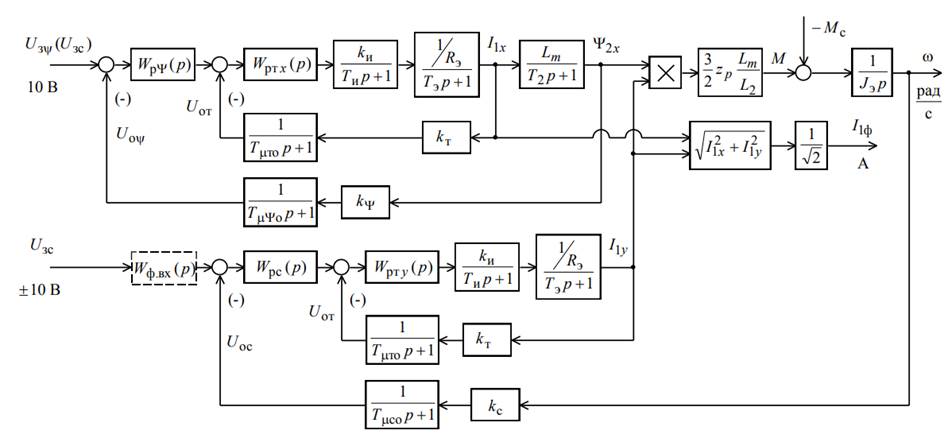
Рисунок 3. Структурная схема линеаризованной САУ частотно-регулируемого асинхронного электропривода при векторном регулировании скорости
5.1 Настройка контура потокосцепления (КП)
При оптимизации контура потокосцепления внутренний оптимизированный замкнутый контур тока представлен усеченной передаточной функцией 1-го порядка
где ![]() эквивалентная постоянная времени оптимизированного контура тока.
эквивалентная постоянная времени оптимизированного контура тока.
На Рисунке 4 и Рисунке 5 ниже приведена структурная схема контура потокосцепления и динамическая модель контура на платформе REPEAT
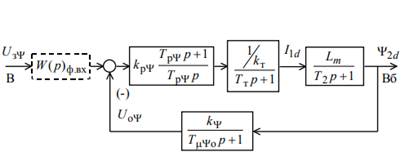
Рисунок 4. Структурная схема контура потокосцепления
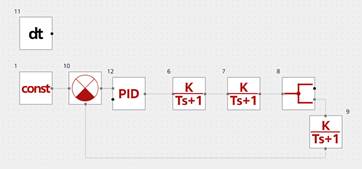
Рисунок 5. Схема динамической модели контура потокосцепления
Контур потокосцепления характеризуется одной большой постоянной времени в прямом канале ![]() и малыми постоянными времени в прямом канале
и малыми постоянными времени в прямом канале ![]() и в цепи обратной связи
и в цепи обратной связи ![]() .
.
В качестве регулятора потокосцепления принимаем ПИ-регулятор с передаточной функцией:
и настраивается на модульный оптимум:

![]()
где ![]() эквивалентная малая постоянная времени контура потока:
эквивалентная малая постоянная времени контура потока:
![]()
![]() коэффициент обратной связи по току:
коэффициент обратной связи по току:
![]()
где ![]() максимальное значение напряжение задания на входе КП;
максимальное значение напряжение задания на входе КП;
![]() коэффициент оптимизации контура потокосцепления.
коэффициент оптимизации контура потокосцепления.
5.1.1 Анализ переходной характеристики КП
Строится переходная характеристика КП по задающему воздействию. Значение задающего воздействия на Кп ![]() = 10 В (см. Рисунок 6).
= 10 В (см. Рисунок 6).
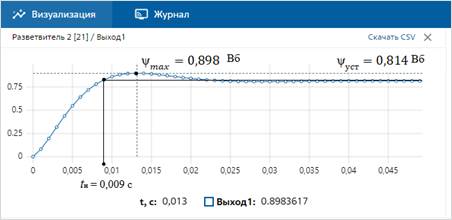
Рисунок 6. Переходная характеристика контура потокосцепления по задающему воздействию
Максимальное отклонение потокосцепления ЭД ![]() Вб установившееся значение
Вб установившееся значение ![]() Вб.
Вб.
Ожидаемое значение перерегулирования ![]() при настройке на оптимум по модулю
при настройке на оптимум по модулю ![]()
Перерегулирование σкп:

Отклонение от ожидаемого значения составляет ![]() и принимается допустимым.
и принимается допустимым.
Время нарастания полученной характеристики ![]() :
:
![]()
Расчетное значение ![]() :
:
![]()
Отклонение измеренного и рассчитанного значения ![]() :
:
![]()
Отклонение по ![]() допустимое. Настройка контура потокосцепления на оптимум по модулю проведена успешно.
допустимое. Настройка контура потокосцепления на оптимум по модулю проведена успешно.
5.2 Настройка контура скорости (КС)
При оптимизации контура скорости внутренний оптимизированный замкнутый контур тока также, как и в КП представлен усеченной передаточной функцией 1-го порядка:
где ![]() эквивалентная постоянная времени оптимизированного контура тока.
эквивалентная постоянная времени оптимизированного контура тока.
Структурная схема контура скорости и схема динамической модели контура приведены на Рисунке 7 и Рисунке 8 ниже.
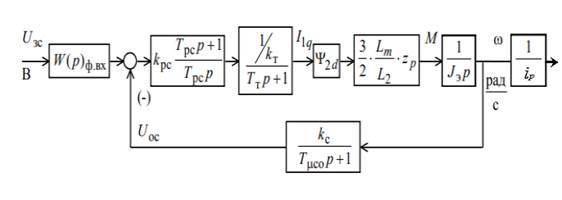
Рисунок 7. Структурная схема контура скорости
Рисунок 8. Схема динамической модели контура скорости
Так как электромагнитный момент ЭД при векторном управлении формируется на основе потокосцепления ротора и тока статора:
![]()
Полная схема динамической модели электропривода имеет вид (см. Рисунок 9):
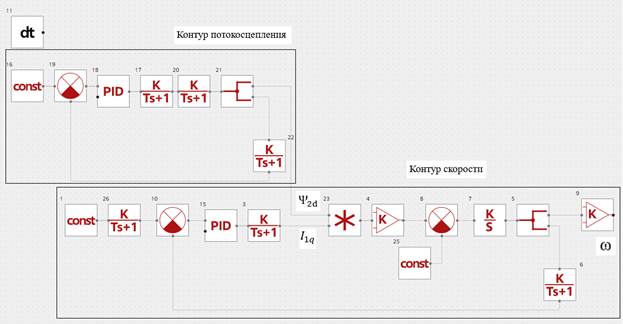
Рисунок 9. Схема динамической модели линеаризованной САУ частотно-регулируемого асинхронного электропривода при векторном регулировании скорости
В качестве регулятора скорости принимается ПИ-регулятор с передаточной функцией:
и предварительно настраивается на симметричный оптимум:

![]()
где:
![]() эквивалентная малая постоянная времени контура скорости:
эквивалентная малая постоянная времени контура скорости:
![]()
![]() коэффициент обратной связи по току:
коэффициент обратной связи по току:
![]() максимальное значение напряжение задания на входе КС;
максимальное значение напряжение задания на входе КС;
![]() коэффициент оптимизации контура скорости.
коэффициент оптимизации контура скорости.
5.2.1 Анализ переходной характеристики КС
Для анализа переходной характеристики КС необходимо рассмотреть следующий график, полученный при моделировании на ПО REPEAT (см. Рисунок 10):
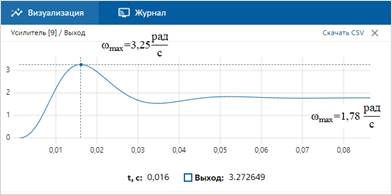
Рисунок 10. Переходная характеристика контура скорости по задающему воздействию без входного фильтра
Перерегулирование составляет

Перерегулирование значительное, необходима установка входного фильтра. Следует установить два сглаживающих фильтра с передаточными функциями вида:
где постоянная времени выбирается из условия:
![]()
![]()
Оптимизированная схема динамической модели контура скорости ЭП ( (см. Рисунок 11) примет вид:
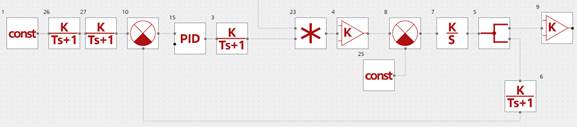
Рисунок 11. Схема динамической модели контура скорости с двумя входными фильтрами
Показатели переходной характеристики оптимизированного контура (см. Рисунок 12) заметно улучшатся.
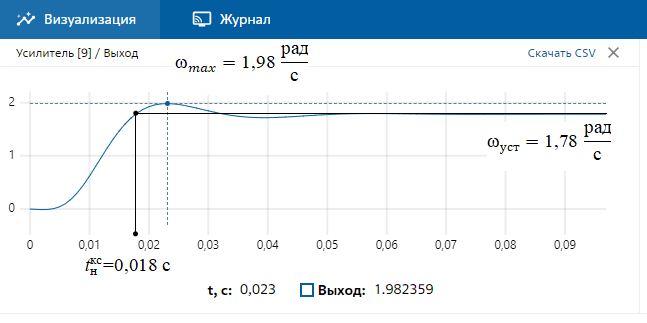
Рисунок 12. Переходная характеристика контура скорости по задающему воздействию с входными фильтрами
Настройка контура скорости с двумя фильтрами на входе близка к точной настройке на МО системы 3–го порядка. Контур скорости представляет собой астатическую систему 1–го порядка по управлению и обеспечивает точную отработку заданного значения скорости.
Перерегулирование σкс:

Отклонение от ожидаемого значения составляет ![]() и принимается допустимым.
и принимается допустимым.
Время нарастания полученной характеристики ![]() :
:
![]()
Расчетное значение ![]() :
:
![]()
Отклонение измеренного и рассчитанного значения ![]() :
:
![]()
Отклонение по ![]() допустимое. Настройка контура скорости проведена успешно.
допустимое. Настройка контура скорости проведена успешно.
Результаты моделирования
Исходя из полученных результатов, можно сделать вывод о возможности создания динамической модели асинхронного электропривода с векторным управлением и настройки контуров скорости и потокосцепления путем синтеза регуляторов и сглаживающих фильтров, используя возможности ПО REPEAT. Также с его помощью возможно проведение анализа переходных характеристик контуров, c определением основных показателей качества таких как перерегулирование и время нарастания для серийно выпускаемых изделий типа асинхронного электродвигателя с короткозамкнутым ротором.